面臨的挑戰:
在戰場(chang)上(shang),地(di)(di)面車輛的(de)機動性(xing)堪稱任務成(cheng)功與否的(de)分水嶺。當今(jin)的(de)國防環境需要打造一種可快速部署、高機動�����性(xing)的(de)車輛平臺,能(neng)(neng)夠在各(ge)種地(di)(di)形和道路類型之(zhi)間(jian)可靠(kao)地(di)(di)操作。近年來,針對不(bu)同的(de)環境條件和操作場(chang)景進(jin)行性(xing)能(neng)(neng)評估(gu)的(de)車輛仿真能(neng)(neng)力已大(da)幅提升。
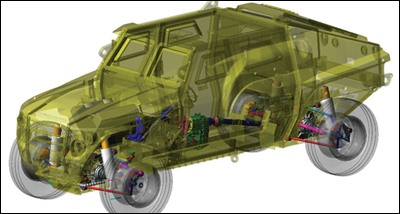
為(wei)了(le)(le)(le)(le)支(zhi)持(chi)下(xia)一代北(bei)約參考機(ji)動性(xing)(xing)模型(xing)(NG-NRMM)項(�����xiang)目,對現有 CAE 機(ji)動性(xing)(xing)分析能(neng)(neng)力進行(xing)評估,使用(yong)了(le)(le)(le)(le)各(ge)種(zhong)不同(tong)的海克斯康產(chan)品(pin)組合(he)對 FED-Alpha(一種(zhong)燃料(liao)效(xiao)率示范車輛(liang))的機(ji)動性(xing)(xing)進行(xing)了(le)(le)(le)(le)評估和可視(shi)化(圖 1)。為(wei)支(zhi)持(chi)這(zhe)項(xiang)工作,由(you) Eric Pesheck、Venkatesan Jeganathan、Tony Bromwell、Aniruddh Matange 及Paspuleti Rahul Naidu 組成(cheng)的團隊依照現實(shi)世界(jie)的校準數據創建(jian)并(bing)驗(yan)證了(le)(le)(le)(le) Adams 模型(xing)。然后采用(yong)這(zhe)些(xie)經過驗(yan)證的模型(xing)來準確預測各(ge)種(zhong)道(dao)路和越(yue)野操作場(chang)景下(xia)的車輛(liang)性(xing)(xing)能(neng)(neng)。通過專門開(kai)發的可視(shi)化和機(ji)動性(xing)(xing)映射應用(yong)程(cheng)序,將選自這(zhe)些(xie)分析研究的結果(guo)集整(zheng)合(he)到 Luciad 中(zhong)(海克斯康地理空間產(chan)品(pin)組合(he)的一部分)。此外,還證明了(le)(le)(le)(le) Adams 模型(xing)的實(shi)時(shi)兼容能(neng)(neng)力,可支(zhi)持(chi)各(ge)種(zhong)自主(zhu)場(chang)景和“硬件在�������環(huan)”場(chang)景。
來自海克斯康的解決方案:
創建并驗(yan)證(zheng) Adams 模型
Adams Car 是 Adams 產品(pin)組合中的(de)垂直(zhi)解(jie)決(jue)方(fang)案,專攻車輛總成和子(zi)系統的(de)建模(mo)和仿真,可用于(�����yu)創建 FED Alpha Adams Car 的(de)整車模(mo)型(采用基于(yu)模(mo)板的(de)方(fang)法建模(mo));
可使(shi)用車(che)輛數(shu)據(ju)填充(chong)可重復使(shi)用的子系(xi)統參數(shu)模板(例(li)如(ru)底盤、輪胎、動力(li)系(xi)等),并(bing)通過集成(cheng)創建整車(che)總(zong)成(cheng),如(ru)圖 2 所示。典型(xing)的模型(xing)數(shu)據(ju)包括設計(ji)重點(dian)、零件(jian)質(zhi)量屬性(xing)以及部件(jian)兼容性(xing)特征。Adams Car 能對部件(jian)進行(xing)詳(xiang)細(xi)描��������述,例(li)如(ru)柔韌性(xing)、摩擦力(li)或者與(yu)頻率(lv)有(you)關的行(xing)為(wei)(如(ru)有(you)必(bi)要(yao))。
模型(xing)中所采用(yong)的(de)(de)逼真度和詳細程(cheng)度取決(jue)于仿真意(yi)圖(tu)和可用(yong)�������的(de)(de)設(she)計數據。對各(ge)種車輛測試事(shi)件中收集(ji)到的(de)(de)數據進(jin)行對比,以驗(yan)證模型(xing)的(de)(de)準確(que)性(xing)。通過對比與車輛行為、動力學及乘坐品質有關(guan)的(de)(de)指(zhi)標對模型(xing)進(jin)行驗(yan)證。
用 Adams 模型預測車輛性能
隨(sui)后采用經過驗(yan)證的(de) Adams 模(mo)型(xing)來仿真各(ge)種車(che)輛事件(jian),用以評估車(che�����)輛的(de)性能和機動性。這些事件(jian)包(bao)括模(mo)擬真實戰場(chang)場(chang)景的(de)道路(lu)及越野(ye)行(xing)駛。對典型(xing)的(de)軍事道路(lu)評估事件(jian)進(jin)行(xing)了仿真,例如雙車(che)道變道可(ke)展(zhan)示(shi)極限(xian)操控性能、半圓形道路(lu)可(ke)展(zhan)示(shi)乘(cheng)坐品質、爬階梯可(ke)展(zhan)示(shi)障礙物通行(xing)能力,這些仿真與測試(shi)結果(guo)非常(chang)吻合。
由于在實現(xian)某(mou)些(xie)任(ren)務目標時,有可能(neng)需要在毫無準(zhun)備的(de)地(di)(di)形上進(jin)行(xing)操作(zuo),因此對越(yue)野性能(neng)的(de)評估至關(guan)重要。越(yue)野建(jian)模中最重要的(de)一點就是地(di)(�������di)面(mian)力學(xue)的(de)表(biao)述;土壤(rang)性質以及輪胎(tai)與土壤(rang)表(biao)面(mian)之間的(de)相互作(zuo)用。 本方案中采(cai)用了簡單模型(xing)和(he)精細模型(xing)來(lai)描述地(di)(di)面(mian)力學(xue)。
簡單地面力(li)學模型(xing)采(cai)用基(ji)于(yu)實驗(yan)(yan)測量(liang)的(de)(de)經驗(yan)(yan)關(guan)系來預測可變(bian)形地形對車(che)輛(liang)操作的(de)(de)響應(ying)。該(gai)方法計算(suan)效率高,可依(yi)據定(ding)義(yi)明(ming)確的(de)(de)牽引(yin)和爬坡分(fen)(fen����)析來評估車(che)輛(liang)性(xing)能。而且(qie)該(gai)方法還能用于(yu)各種掃描(miao)過的(de)(de)地形形態,以(yi)便(bian)進(jin)行更廣(guang)泛(fan)的(de)(de)越(yue)野性(xing)能分(fen)(fen)�����析。
另外(wai),由于該方法(fa)計算效率高,能支持隨機分析方法(fa),在(zai)仿(fang)真時(shi)可以從統計的角度將因(yin)模(mo)型和地形(xing)輸入的變化(hua)而(er)引(yin)起的不確定性考慮在(zai)內。這(zhe)些隨機仿(fang)真代(dai)表(biao)了(le)�����數百種潛(qian)在(zai)的土壤特征,能夠預測出整(zheng)個(ge)土壤和地形(xing)屬(shu)性統計范(fan)圍內的車輛性能,進而(er)可得到車輛性能的置信區(qu)間。
此外還采用(yong)(yong)(yong)了逼真度更高的(de)(de)(de)(de)(de)方法,根(gen)據(ju)仿(fang)真微粒(li)的(de)(de)(de)(de)(de)相互作(zuo)用(yong)(yong)(yong)來得到土壤屬性。這通過 Adams 和 E������DEM 的(de)(de)(de)(de)(de)協(xie)同仿(fang)真來實現,后者是 DEM 解決方案所提供(gong)的(de)(de)(de)(de)(de)基于(yu)離散元方法(DEM)的(de)(de)(de)(de)(de)仿(fang)真。在離散元方法中(zhong),材料用(yong)(yong)(yong)一(yi)堆形狀簡單(dan)(通常以(yi)圓(yuan)形和球形為基礎)、相互作(zuo)用(yong)(yong)(yong)的(de)(de)(de)(de)(de)微粒(li)表示(shi)。Adams 和 EDEM 的(de)(de)(de)(de)(de)典型協(xie)同仿(fang)真工作(zuo)流如圖3所示(shi)。根(gen)據(ju)指定的(d������e)(de)(de)(de)(de)車輛部件(jian)對潛在的(de)(de)(de)(de)(de) EDEM 接觸進行定義。用(yong)(yong)(yong)Adams 確(que)定這些零件(jian)的(de)(de)(de)(de)(de)位移并提供(gong)給 EDEM。然后由EDEM 確(que)定產生的(de)(de)(de)(de)(de)反作(zuo)用(yong)(yong)(yong)力,并將(jiang)其傳遞回 Adams。
采用這些(xie)(xie)方法對拉桿牽引力和(he)沙(sha)�����床(chuang)加(jia)(jia)速度等測(ce)試進(jin)行(xing)(xing)仿真,以便測(ce)算 FED 在各種越野場景下的(de)牽引行(xing)(xing)為(wei)。雖然進(jin)行(xing)(xing)了密集(ji)的(de)計算,但這些(��������xie)(xie)仿真不(bu)僅表明逼(bi)真度有(you)了顯(xian)著增加(jia)(jia),而且(qie)與測(ce)試結果的(de)相關性也(ye)更為(wei)準確。
機動性映射
借助品種(zhong)繁多的(de)(de)(de)(de)(de)海克(ke)斯(si)康產品組合(he)(圖(tu) 5),運用地(di)理(li)空間業務(wu)部的(de)(de)(de)(de)(de����) Luciad Lightspeed 技術(shu)將 Adams 預(yu)測(ce)(ce)的(de)(de)(de)(de)(de) FED Alpha 機動性特征投影(ying)到(dao) Keewenaw 研究中心(KRC)的(de)(de)(de)(de)(de)測(ce)(ce)試地(di)形上(shang)。將 Adams 預(yu)測(ce)(ce)與(yu)地(di)理(li)空間映射技術(shu)整合(he)在(zai)一起,就可(ke)(ke)(ke)以(yi)(yi)基(ji)于(yu)各種(zhong)土壤、等級以(yi)(yi)及預(yu)測(ce)(ce)的(de)(de)(de)(de)(de)車(che)輛性能數據的(de)(de)(de)(de)(de)組合(he),在(zai)整個映射范圍內實現對車(che)輛速度(du)的(de)(de)(de)(de)(de)可(ke)(ke)(ke)視(shi)化。此外(wai),還可(ke)(ke)(ke)以(yi)(yi)根據選定的(de)(de)(de)(de)(de)路線(xian)端點來計(ji)算優(you)化路線(xian)。
可將邊坡預測、障礙(ai)物信息等(deng)附(fu)加(��������jia)操作(zuo)數據合并到上述框(kuang)架中,由此建立起一個(ge)可運用仿真車輛性能數據對實(shi)際地(di)������形進(jin)行全面機動(dong)性評估的平臺。
實(shi)時(shi)虛擬模型性能
在(zai)驗(yan)證用(yong)(yong)于機動(dong)性評(ping)估�������的全(quan)逼真 Adams 模(mo)型(xing)對與其銜接的硬件(jian)在(zai)環(HIL)和 ADAS 應用(yong)(yong)程序(xu)的適(shi)用(yong)(yong)性時,需要為(wei)全(quan)逼真模(mo)型(xing)創建一個降階實(shi)時兼容變(bian)量。
由(you)該變量可推(tui)導出不同逼真度、滿足(zu)特定(ding)仿(fang)真意圖的(de)(de)(de)車(che)(che)輛動(dong)力學建模(mo)(mo),這樣用戶只需部署單(dan)一(yi)的(de)(de)(de)建模(mo)(mo)解決(jue)方(fang)案,不必在(zai)各種工具之間進(jin)(jin)行(xing)昂貴且(qie)易于出錯(cuo)的(de)(de)(�����de)模(mo)(mo)型(xing)轉換。此外(wai),借助 Adams 實時方(fang)法,用戶可以更加(jia)自由(you)地(di)保留(liu)感興趣的(de)(de)(de)模(mo)(mo)型(xing)特征。通常可根據分析和綜(zong)合要求對(dui)(dui)所選定(ding)的(de)(de)(de)部件和連接(jie)的(de)(de)(de)表述進(jin)(jin)行(xing)一(yi)些(xie)簡(jian)化(hua)(hua),從而(er)得到實時車(che)(che)輛性(xing)能。在(zai)本例中(zhong)(zhong),僅對(dui)(dui)防側(ce)傾桿模(mo)(mo)型(xing)進(jin)(jin)行(xing)了簡(jian)化(hua)(hua)。在(zai) VTD(虛擬試駕(jia))分析環境中(zhong)(zhong)對(dui)(dui)實時模(mo)(mo)型(xing)進(jin)(jin)行(xing)測試以驗證其功能。此外(wai),還參照基準(zhun)整車(che)(che)性(xing)能對(dui)(dui)該模(mo)(mo)型��������(xing)的(de)(de)(de)數值精度和效率進(jin)(jin)行(xing)了評估。
Adams 長期以(yi)來一(yi)直(zhi)活(huo)躍在道路(lu)分(fen)析(xi)(xi)領域(yu)。這項工(gong)作展示了如(ru)何運用(yong)各種海克斯康產(chan)品組合來擴展這些模型,并(bing)將其重(zhong)復用(yong)于道路(lu)地形(xing)表述、實時分(fen)析(xi������)(xi)以(yi)及操作映射(she)背景下的越野分(fen������)析(xi)(xi)。
客戶簡介:
北約(yue)
返回

 服務熱線
服務熱線

 全國免費服務熱線
全國免費服務熱線 電話:022-23770780 / 022-23770790
電話:022-23770780 / 022-23770790
 400服務電話:400-803-7058
400服務電話:400-803-7058
 手機 :13920270246
手機 :13920270246
 地址:天津市津南區海棠科創園TZ101
地址:天津市津南區海棠科創園TZ101
